
Der Periodischen Fehler von verschieden Montierungen:
Was der Strehl beim Spiegel ist der Periodische Fehler bei der Montierung. Kurz und gut desto kleiner der Periodische Fehler (PE) desto besser die Qualität der Monti. Man sollte aber auch berücksichtigen das der PE gleichmäßig verläuft da ansonsten die Möglichkeit des Autoguiden nicht gegeben ist (zu schnelle Sprünge macht keine Computersteuerung mit!). Allgemein kann man sagen:
Wenn eine Monti keine "Sprünge" während des PE und in Summe dieser <10" ist, gehört diese Montierungen zu den Spitzenmontierungen!
Ich möchte hier mal den PE verschiedener Montierungen zeigen, welche bisher durch meine Finger gegangen sind.
Messmethode:
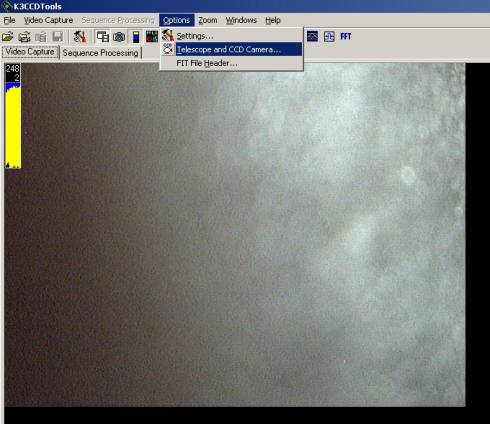
Prinzipiell wird ein Stern mittels Webcam und dem Programm K3CCDTOOLS vermessen.
Download: Messung PE als pdf.
Celestron CI700
ohne PEC mit PEC
1 Schneckenumdrehung = 478,69sec
Losmandy G11
(zwei verschiedene Montierungen)
ohne PEC


1 Schneckenumdrehung = 239,34sec
Synta H-EQ5
(2 verschiedene Montierungen)


Vixen GP-E
Anleitung zur Vermessung des Periodischen Fehlers PE:
1.Einleitung:
Jede Montierung
bringt pro Umdrehung der Schnecke auf das Hauptzahnrad einen Nachführfehler mit
sich welcher als periodischer Fehler oder englisch Periodic error kurz PE
bezeichnet wird
Wie der Strehl bei
der Optik gilt der Periodische Fehler bei einer Montierung als Maß für dessen
Qualität.
Diese Aussage ist
nur zu einem Teil richtig da es nicht darauf ankommt wie groß der periodische
Fehler einer Montierung ist sondern wie dieser zeitlich verläuft!
Der Periodische
Fehler sollte pro zeit keinerlei große ruckartigen Sprünge machen da diese
kein Autoguider ausgleichen kann, das bedeutet somit, desto gelichmäßiger die
Kurve verläuft desto besser die Montierung!
Wenn dann noch der
absolute Wert des Periodischen Fehlers minimal ist, besitzt man eine
Spitzenmontierung!
2.) Durchführung
der Messung des Periodischen Fehlers:
Hierzu verwende ich
eine Webcam Typ Philips ToUcam und das Programm K3CCDTools Version 1.1.7.549
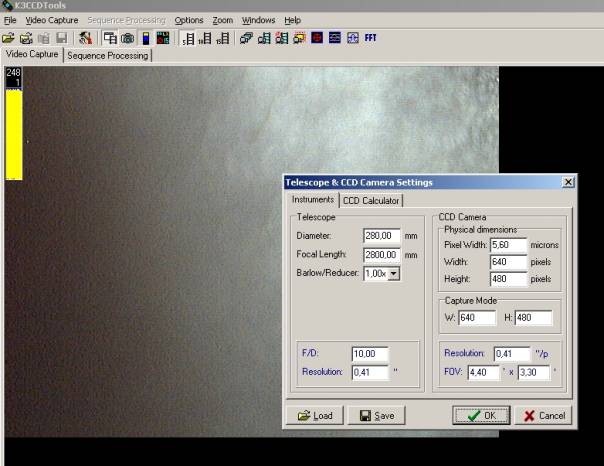
Die Webcam wird an
das Teleskop angebracht und der livestream mittels K3CCDTools gestartet. Zuerst
gibt man die Daten seines Teleskops z.B. C11 (d=280mm; f=28000mm) bzw. der
Webcam ein damit die Messung auch der Realität entspricht.
Die Webcam wird am
Teleskop durch drehen so fixiert, dass die Sterne in Rektaszension waagrecht
verlaufen und in Deklination senkrecht. Hierzu kann man bei K3CCDTools das
Fadenkreuz als Hilfe benutzen
Hierbei ist es egal
ob man einen Stern in der Nähe des Poles oder des Himmelsäquators zur Messung
verwendet. Die Sterne ziehen am Himmel in Abhängigkeit Ihrer Deklination pro
Zeit die gleichen Winkel zurück. Der Polarstern legt in 12h den gleichen Winkel
zurück wie die Gürtelsterne im Orion. Der Unterschied bei beiden Deklinationen
ist aber die Güte der Einnordung der Montierung. Das heißt je ungenauer die
Montierung eingenordet ist desto schneller wird der Stern das Messfenster
verlassen! Somit sollte man bei der Messung auf eine halbwegs gute Einnordung
achten!
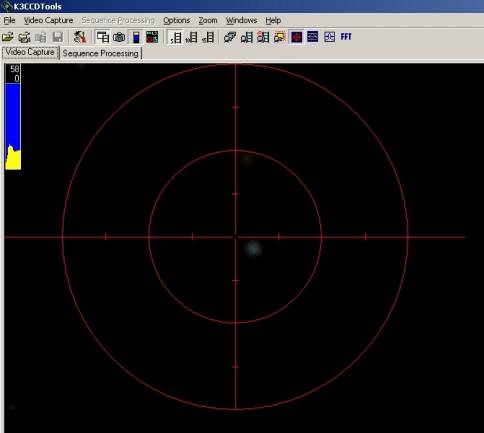
Nun schaltet man
den „Drift Explorer“ an und markiert einen Stern mittels dem „Target“

Sofort startet das
Programm die Driftverläufe von RA (Rektaszension) und DEC (Deklination) auf zu
zeichnen. Nun müssen diese aber noch in eine Datenbank geschrieben werden (Log
to file) damit man diese später z.B. in Excel auswerten Kann.

Man sollte nun
diese Messung mindestens 10 min laufen lassen damit an sicher eine Umdrehung der
Schnecke messtechnisch erfassen kann.
Diese Datei findet
man anschließend als Datei : drift0000.log im Verzeichnis von K3CCDTools unter
Programme.
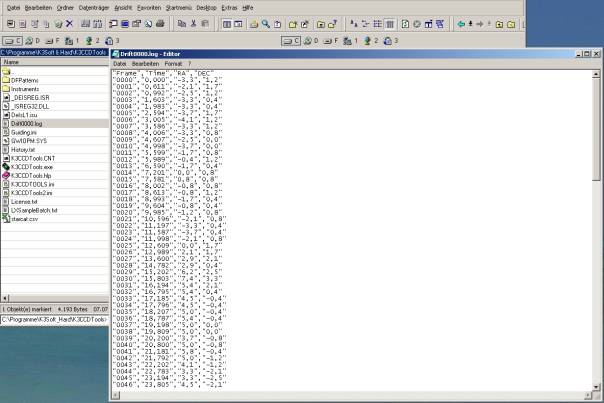
Diese Datei öffnet
man nun in Excel und beginnt mit dessen Auswertung:


3.) Auswertung der
Messdaten:
Die Messdaten müssen
nun ausgewertet werden damit man für jede Montierung eine vergleichbare Grafik
mit dem Verlauf und dem absoluten Wert des Periodischen Fehlers erhält. Was als
erstes auffällt, ist das die Kurve einen Verlauf nach oben bzw. nach unten
macht. Um diese Kurve zu „begradigen“ kann man folgende Bearbeitung durchführen:
a.)
Man erstellt in der Grafik eine lineare Trendline und lässt sich die
passende Gleichung zu dieser ausgeben.
b.)
linke Maustaste in die Datenreihe klicken und dann mit der rechten
Maustaste die lineare Trendlinie erstellen.
c.)
Man klickt die Trendlinie doppelt neu mit der linken Maustaste an und lässt
sich über „Optionen“ die „Gleichung im Diagramm darstellen“ an
d.)
Diese lineare Gleichung y= mx+b
hier ist y= 0,015x+14,251
e.)
Mit dieser Gleichung werden die RA Messwerte bearbeitet und somit
begradigt: y= Betrag [RA]-m*Time- Betrag [b]
(Bemerkung am Rande: Die Steigung der RA Kurve ohne Begradigung zeigt wieviel die Montierung schneller oder langsamer nachführt als die Erddrehung! Natürlich gilt dies nur wenn zeitgleich die Deklinationsgerade keine Steigung aufweist = exakt eingenordet ist!)

Mit diese
begradigten RA werten kann nun die genaue, begradigte PE Kurve erstellt werden:
Am Beispiel der
unten gezeigten Kurve einer H-EQ-5 kann zwar ein sehr großer Periodischer
Fehler von ±
25 Bogensekunden erkannt werden aber auch ein relativ gleichmäßiger Verlauf
der Kurve. Das bedeutet das jeder Autoguider mit dieser Montierung eine gute
Nachführung erzielen wird!
